
Autonomous Barbeque Robot Manipulator
Advisor: Professor Chung-Ta King - Parallel and Distributed Systems Lab
Mar. 2020 ~ Dec. 2020
- This research is about implementing deep reinforcement learning on a robotic arm to complete a grab-and-place task.
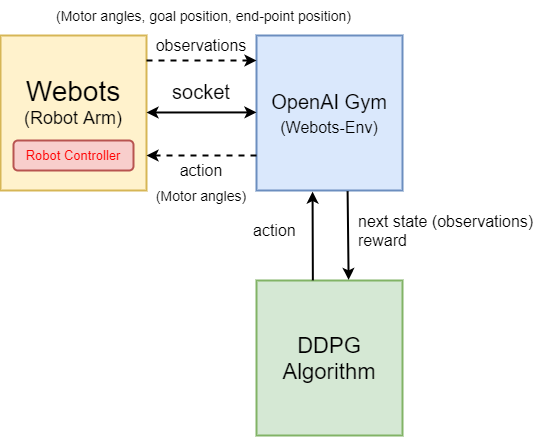
- Accomplished a Deep Deterministic Policy Gradient algorithm for an autonomous barbeque robot.
Launched an OpenAI Gym environment and connected to our Webots robot using socket programming.
- Connected Webots and Open AI Gym:
Demo 01 Video
Demo 02 Video
Reach Task Test