Autonomous Barbeque Robot Manipulator
Using Deep Deterministic Policy Gradient to Complete a grab-and-place task. 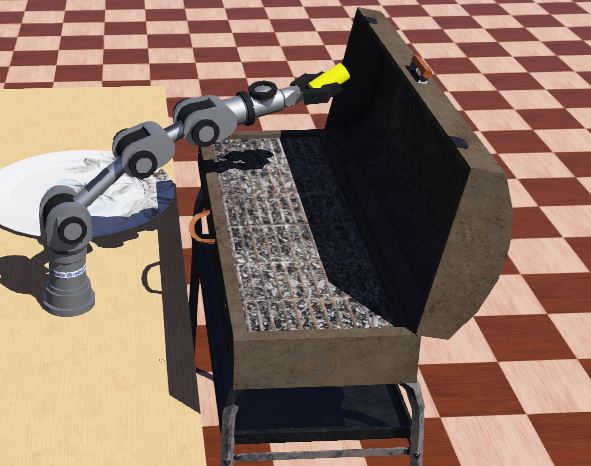

Using Deep Deterministic Policy Gradient to Complete a grab-and-place task.
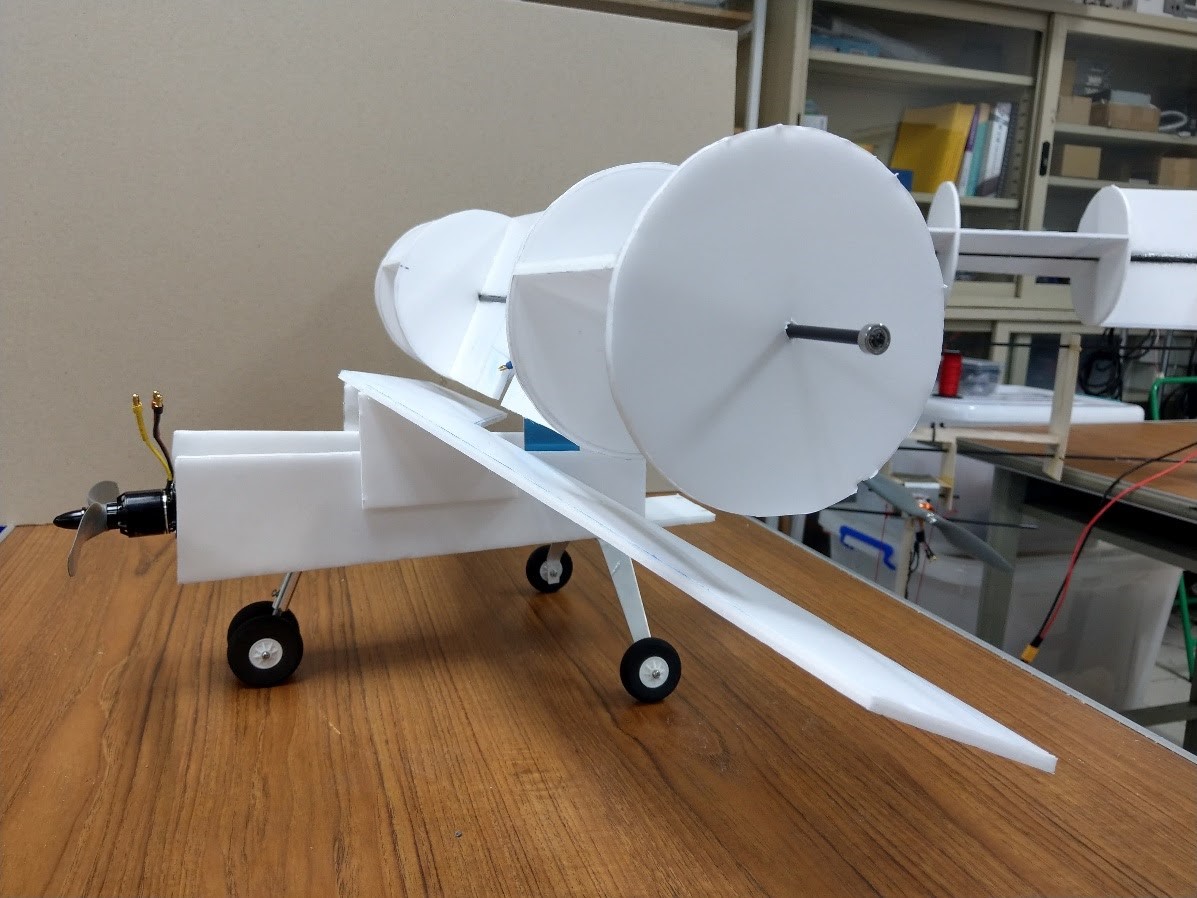
Built Two Manus Aircraft that fly with lift force generated by Magnus Effect in Fluid Mechanics.
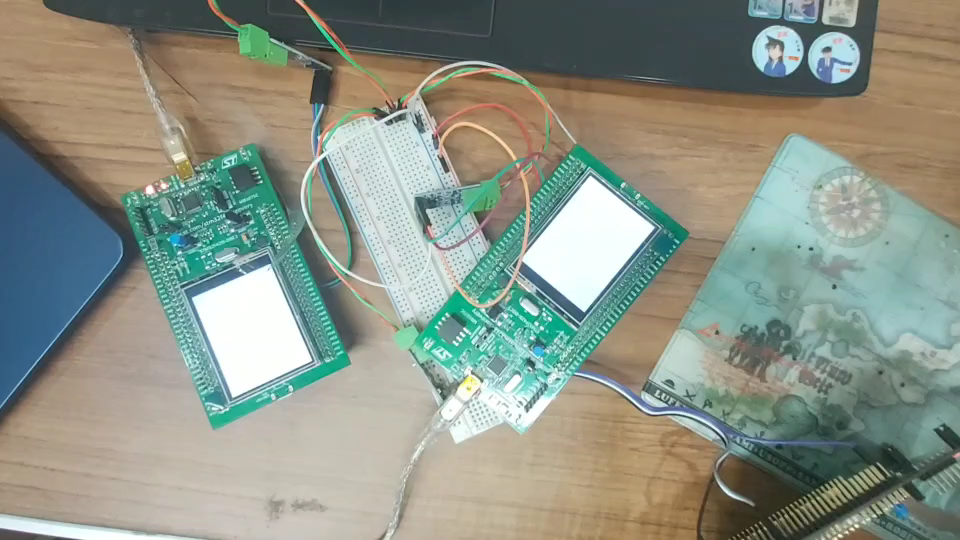
Simulate On-Board Communication between Satellite Subsystems with UART and CAN Bus.