
Mobile Robots
Hockey Robot Contest:
Check Point 1 - ROS Basics
- Use rosserial library to perform ROS communication between raspberry Pi 3 and Arduino UNO R3 board.
Checkpoint 1 Report
Github repository - MobileRobots-checkpoint 1
Check Point 2 - Motion Control
- The robot has two geared-motor with encoders.
- Use PID feedback control to control the speed of the robot acturators.
- Given PWM signals to control each individual motor.
Checkpoint 2 Report
Github repository - MobileRobots-checkpoint 2
Check Point 3 - Sensor + Actuation
- Use only 14 seconds to complete both obstacle avoidance and target achievement.
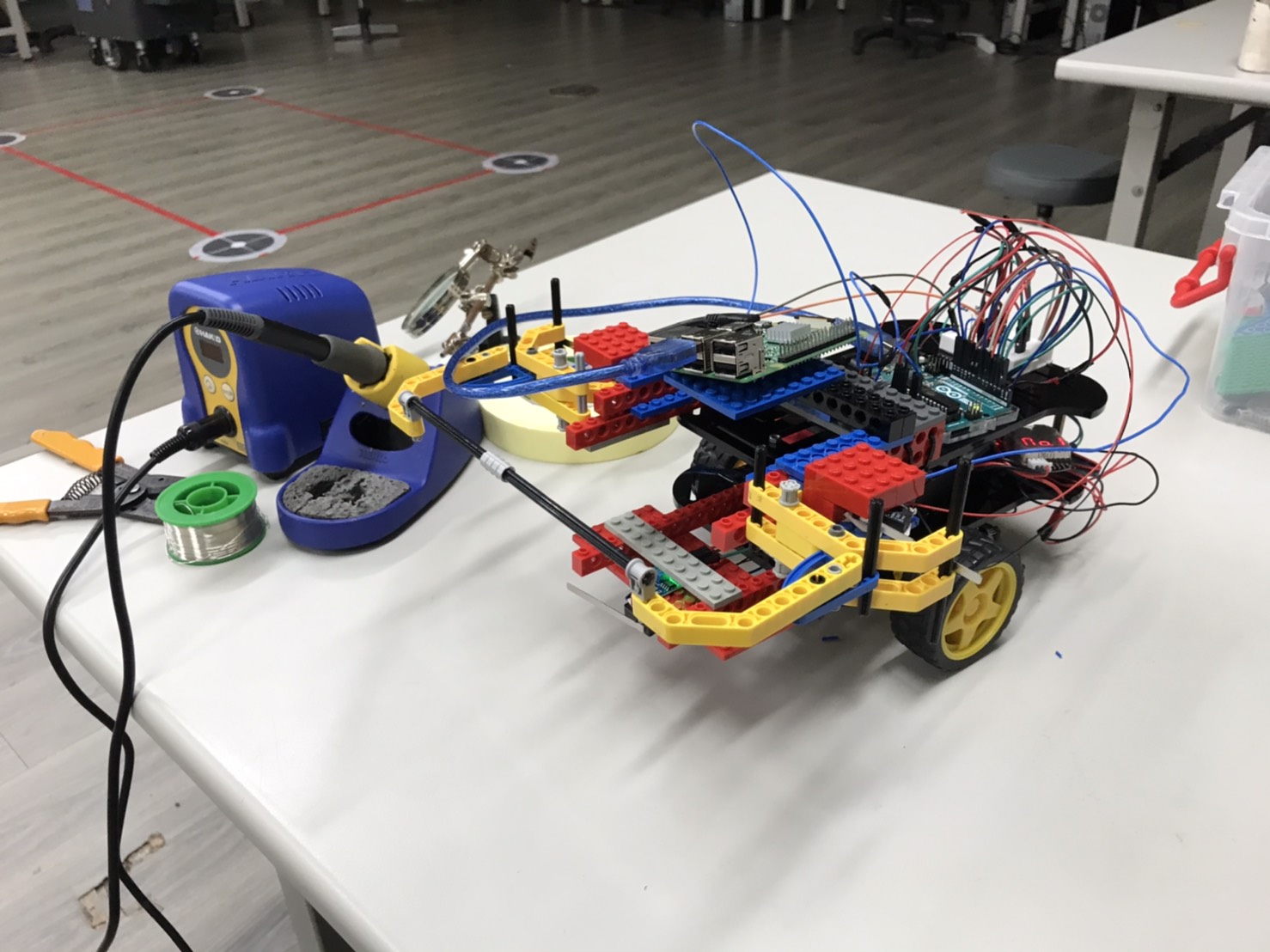
Full Assembly:
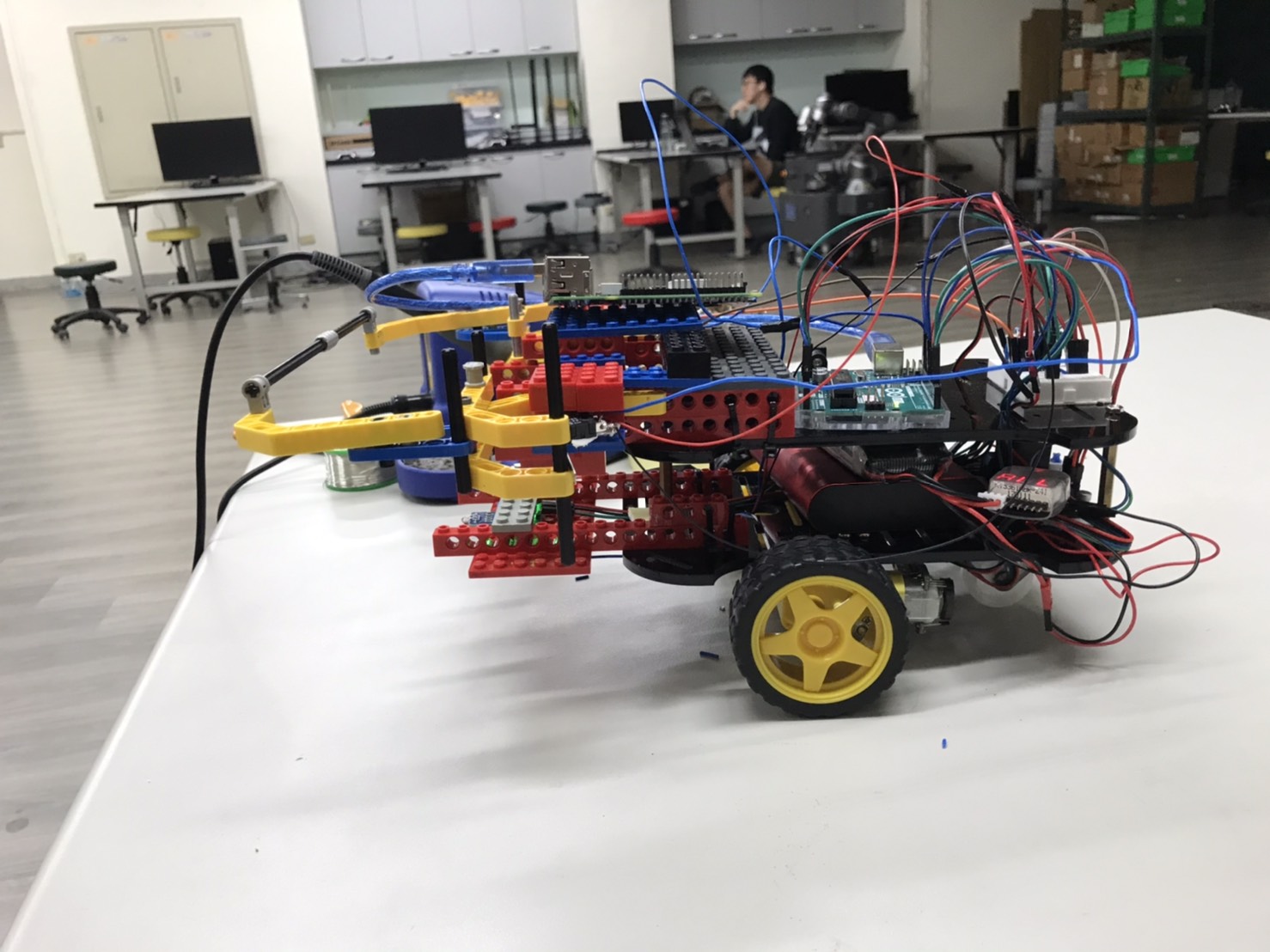
Full Assembly (Side view) :
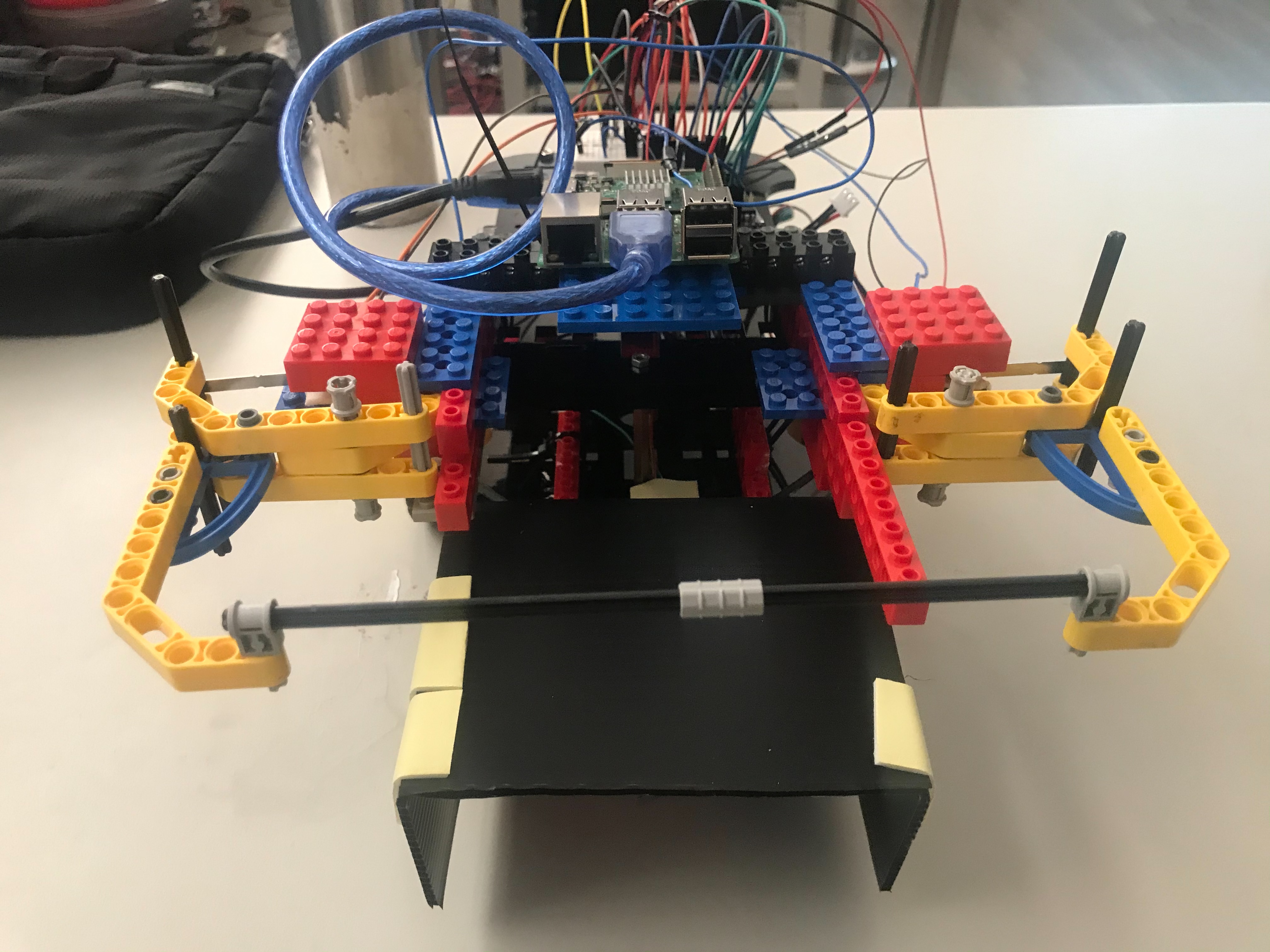
The two obstacle avoidance touch sensors:
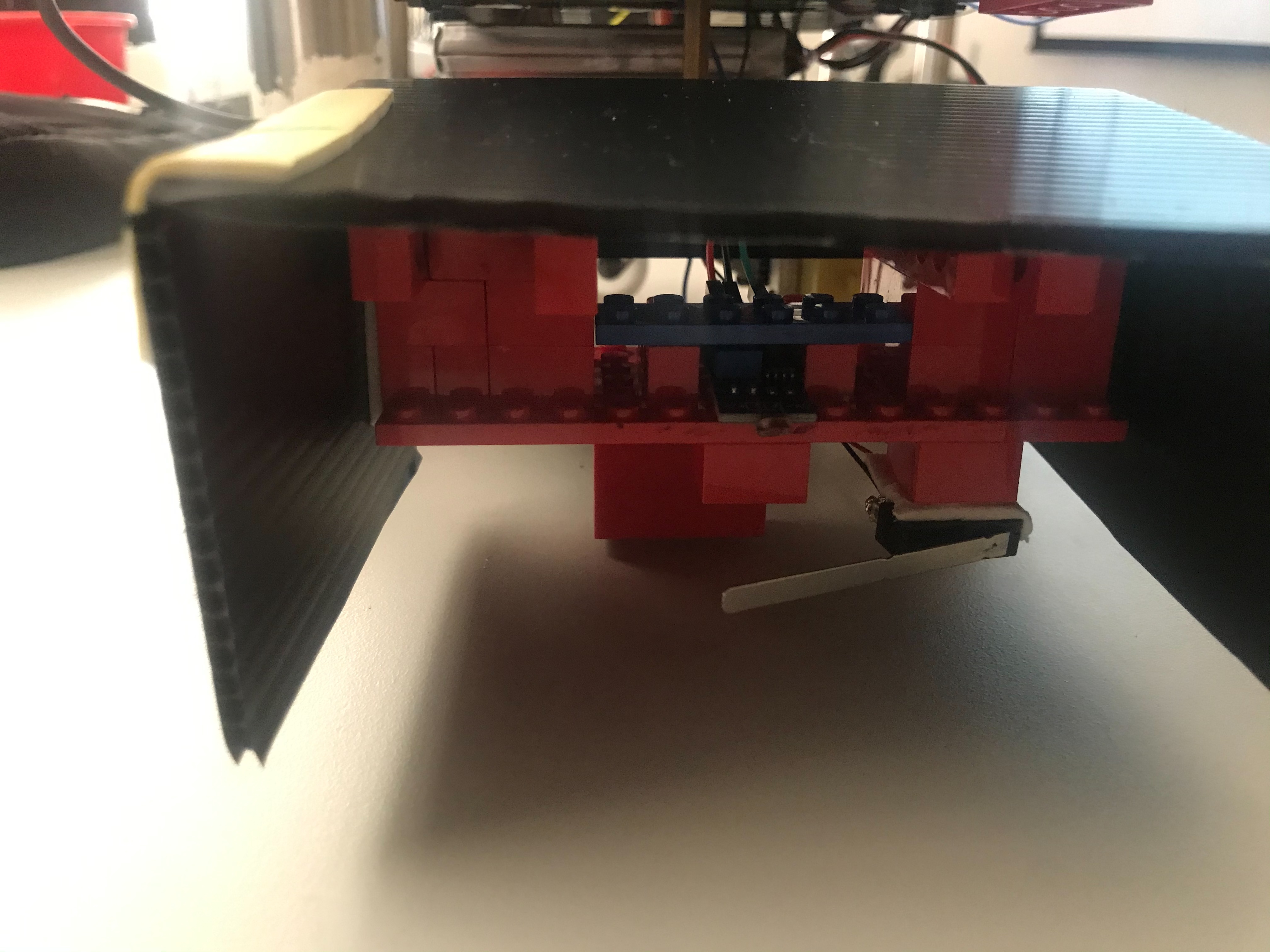
Light Sensor (Inside the black box) and the GOAL touch sensor
Checkpoint 3 Report
Github repository - MobileRobots-checkpoint 3
Check Point 4 - Full Function Demonstration
- The robot should find the LED Light puck, capture it and find the correct goal door and put the puck into it.
- The specified goal door would emit Infrared Signals and the robot should tell which beacon is the correct goal.
Checkpoint 4 Report
Github repository - MobileRobots-checkpoint 4
Final Project: Hector SLAM + ROS 2D Navigation
- Use RPLidar and the hockey robot platform we built to perform Hector SLAM in unstructure environment.
- Use ROS 2D Navigation Stack to perform 2-D navigation with Hector SLAM on our robot.