
About me

Table of Contents
About me
Zheng-Hang is a rising 2nd year master student in Robotics at the University of Michigan and would complete his study in April 2023. He got his Bachelor’s degree in Computer Science and Power Mechanical Engineering at NTHU and he graduated as the top person in college of engineering with a GPA 4.13/4.3.
Zheng-Hang is currently a system software intern at APTIV advanced engineering team, assisting engineers in optimizing the ADAS(Advanced Driver Assistance System) features and performance on the testing vehicle in real-time.
Zheng-Hang has developed the first outdoor skid-steering mobile robot during his internship at Taiwan’s Technology Research center (ITRI). He launched some open source ROS packages and improve the communication efficiency between the joystick and the robot.
In addition to his engineering ability, he is good at leadership and communications by holding some large events during his undergraduate time
My research interests revolve around:
- Autonomous Vehicles
- Intelligent Robotics
- Mobile Robots
- Machine Intelligence
- Mechatronic Control Systems
- Embedded Systems
Skills
- Knowledge: Probablistic Filtering / SLAM / Motion Planning / Deep Learning / Parallel Programming
- Programming Languages: C++ / Python / C / MPI / OpenMP / Pthread / CUDA
- Robotics & Machine Learning: ROS / Linux(Ubuntu) / Webots / Pytorch / Tensorflow / Keras
- Mechanical & Electronics: Arduino / Raspberry Pi / stm32 / Solidworks / Inventor
- Tools: MATLAB / Git / Simulink / Verilog / FPGA / LTSpice / Latex
- Web programming: HTML / CSS / javaScript / firebase / Cocos Creator
- English Ability:
TOEFL iBT: Total:110 R:29 / L:30 / S:23 / W:28
GRE: Total:320 Verbal: 155 / Quantitative: 165 / Analytical Writing: 4.0
Recent Projects
ROB530 Mobile Robotics - Winter 2022
1. Multi-agent Visual SLAM
Demo Video
Github repository
Website
Report
2. Neural Radience Field for Novel View Synthesis
mini-project of EECS598: Deep Learning for Computer Vision by Justin Johnson - Winter 2022

Demo Video - LEGO
Demo Video - Ship
See our MiniProject.ipynp on github to go through our project. (Recommend open it on Google CoLab) Github Link
3. Algorithmic Robotics Projects:
EECS498: Introduction to Algorithmic Robotcs - Fall 2021
RRT : Find path for a robot arm
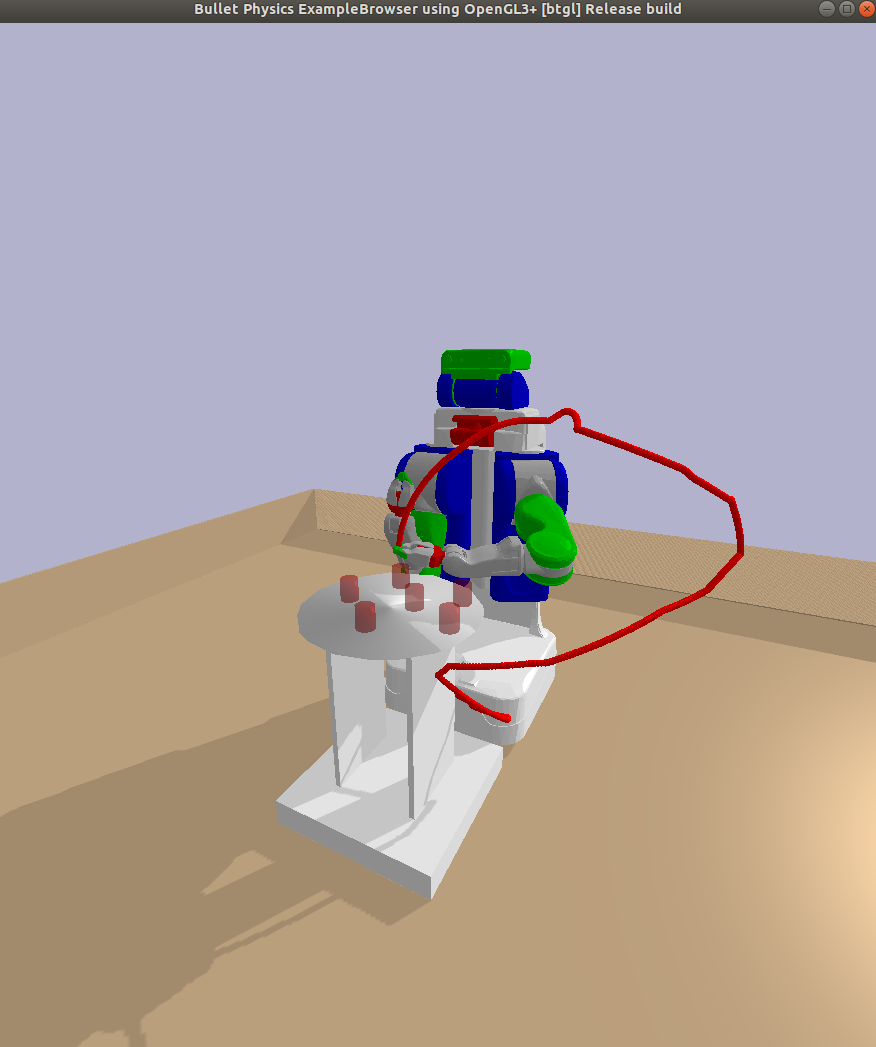
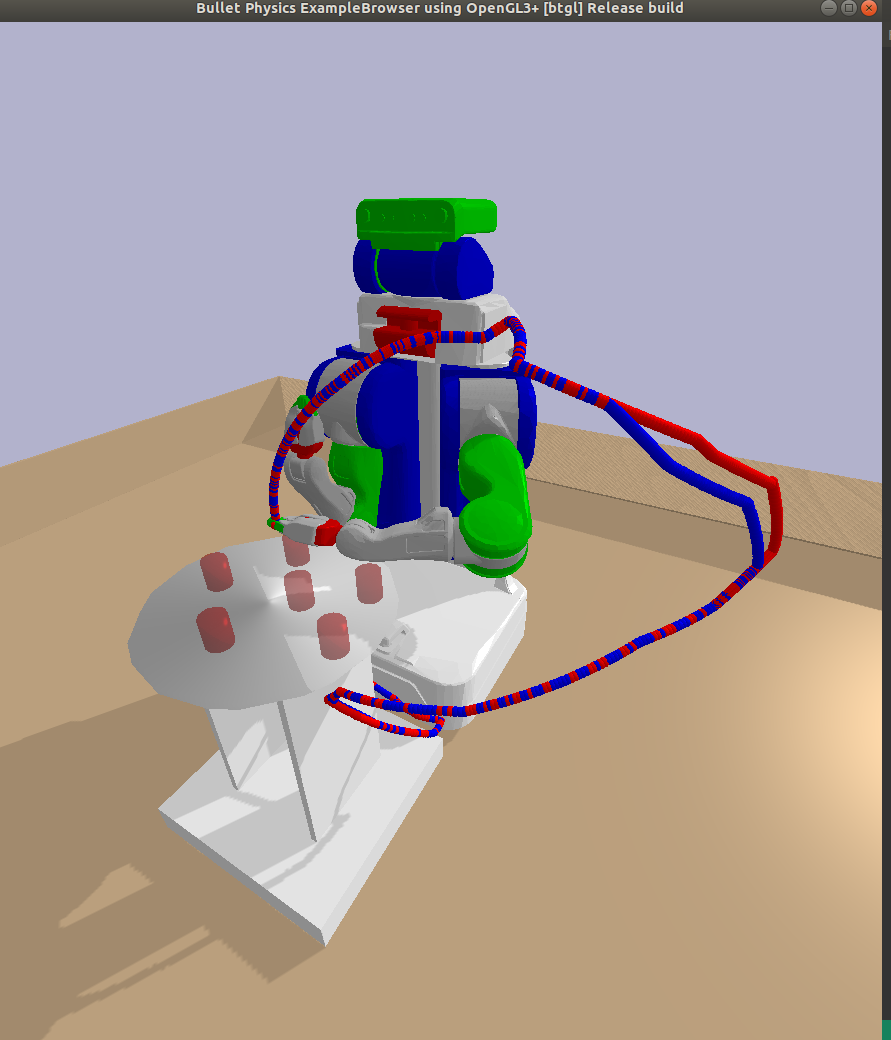
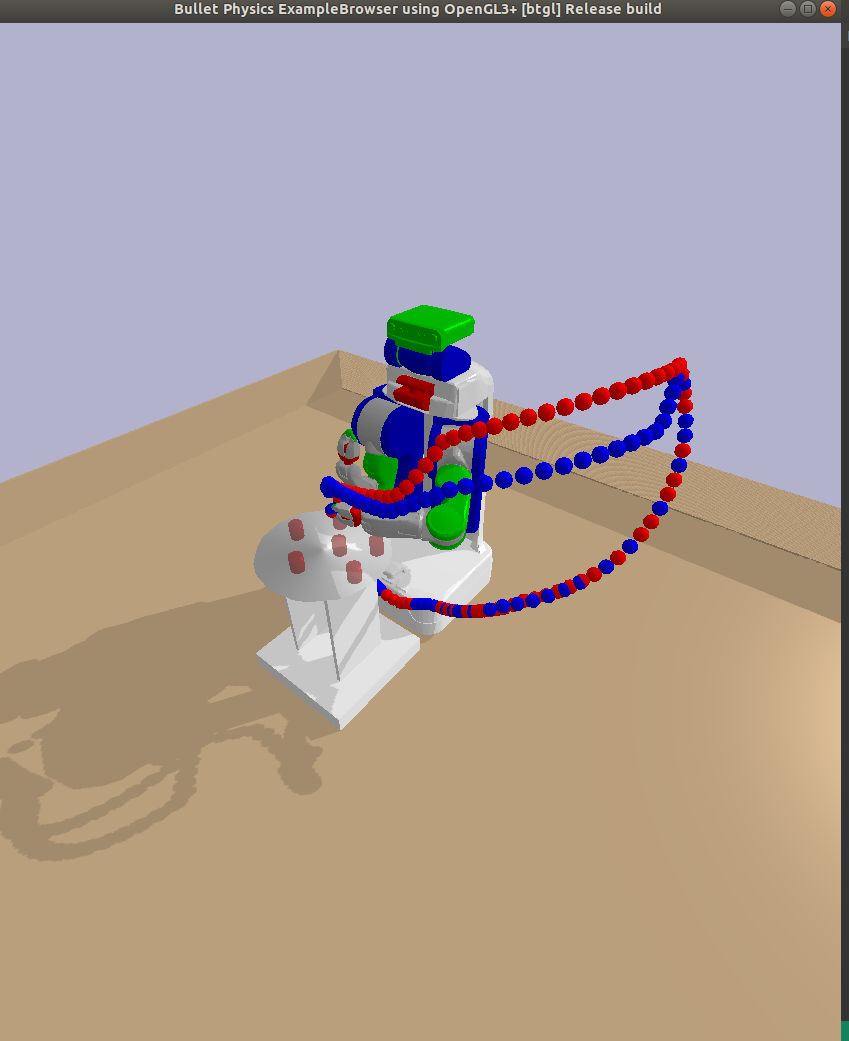
A* : Find path for a 2D robot
A* video
Github repo: Path Planning
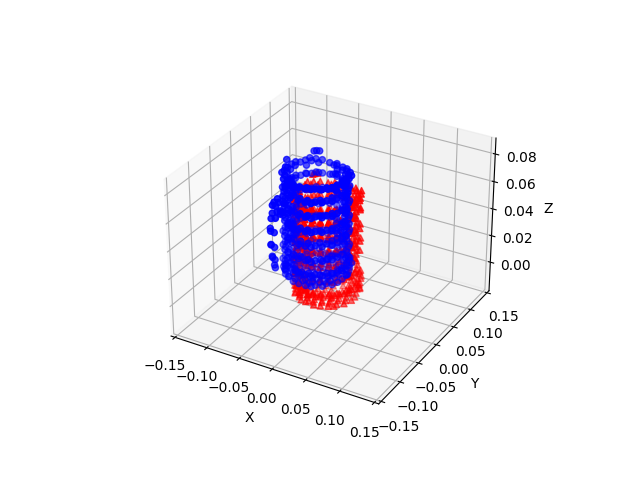
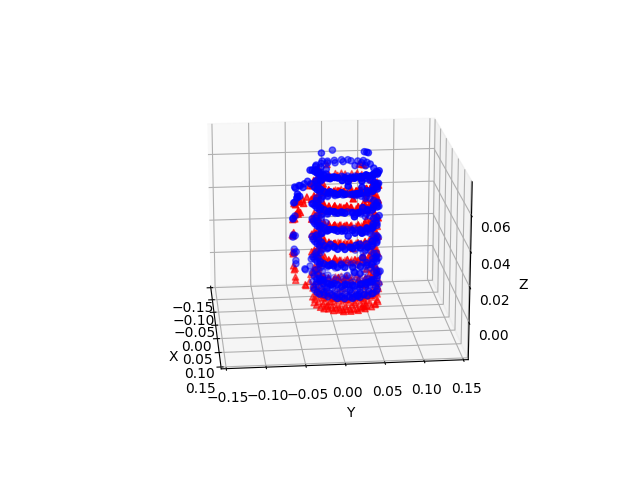
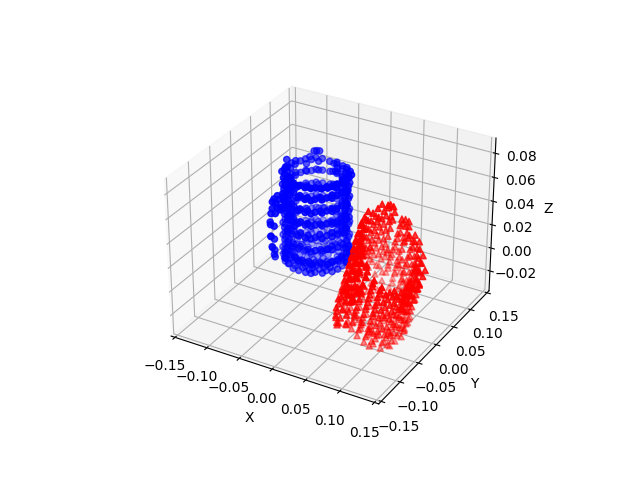
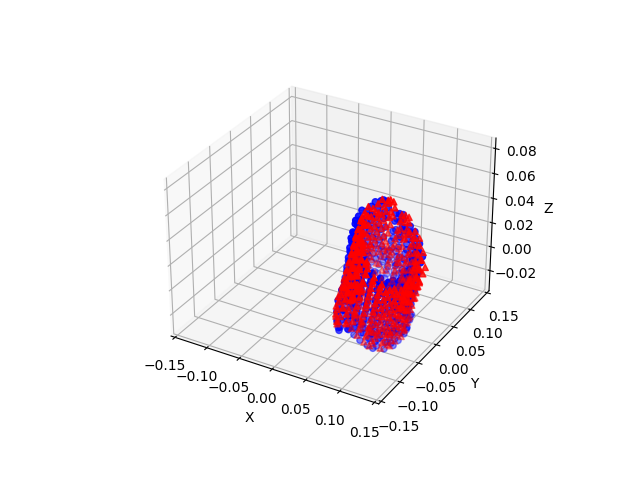
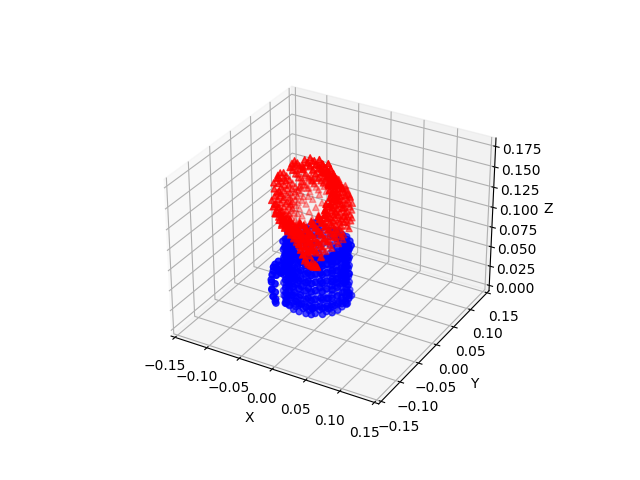
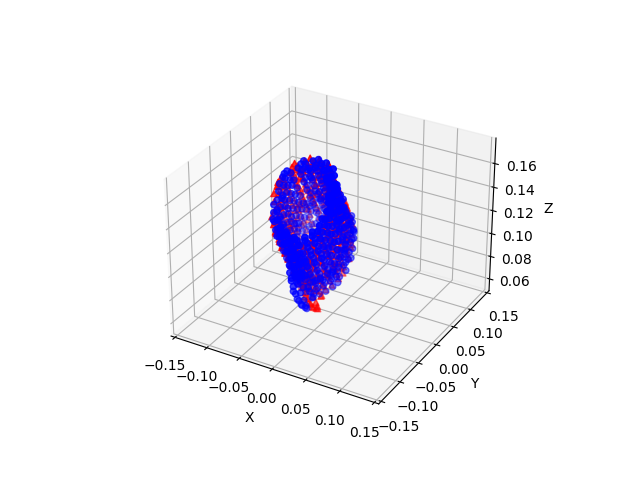
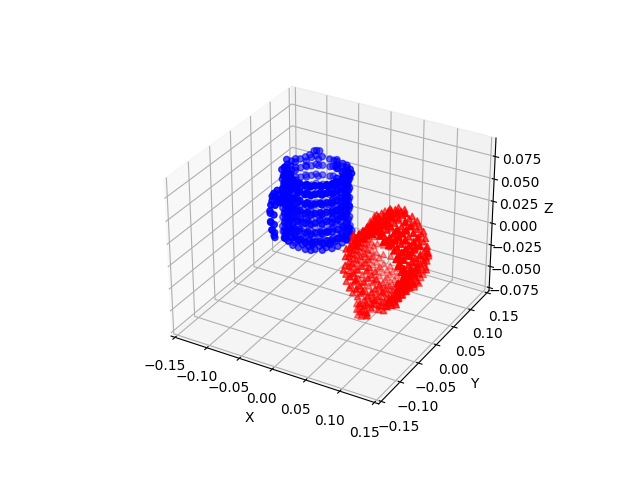
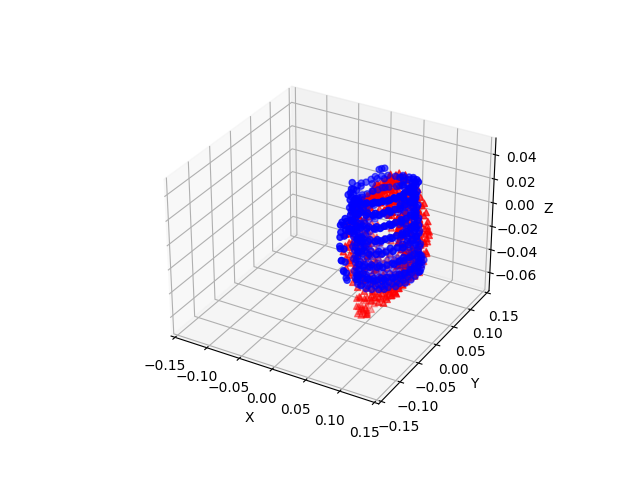
Principle Component Analysis
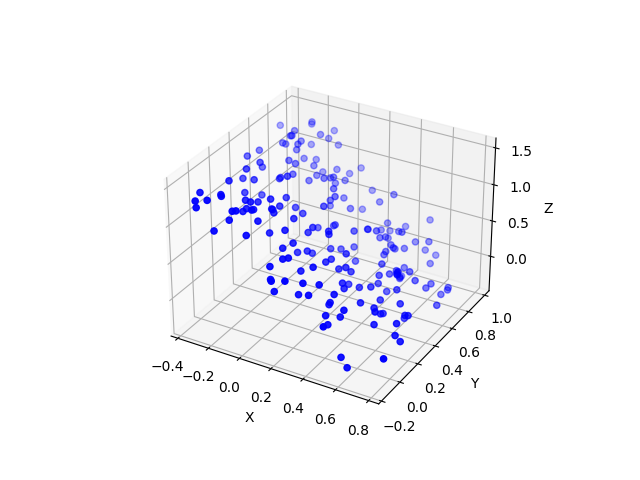
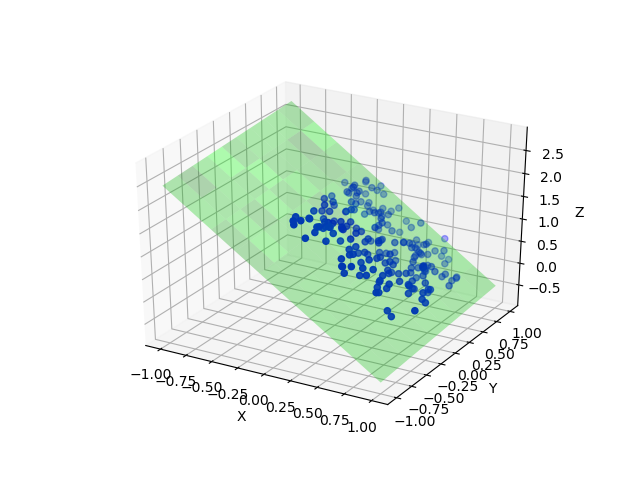
Random Sample Consensus
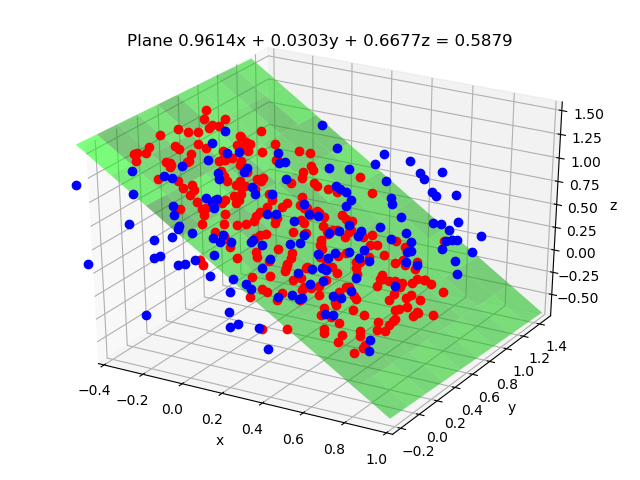
Iterative Closest Point
Optimizations:
(1) Newton’s Method
(2) Gradient Descent (3) Stochastic Gradient Descent (4) Linear Programming
Github repo: Optimizations
Localizations
Given a specified path we designed, compare the localization performances of following two methods: Robot Path
(1) Extended Kalman Filter
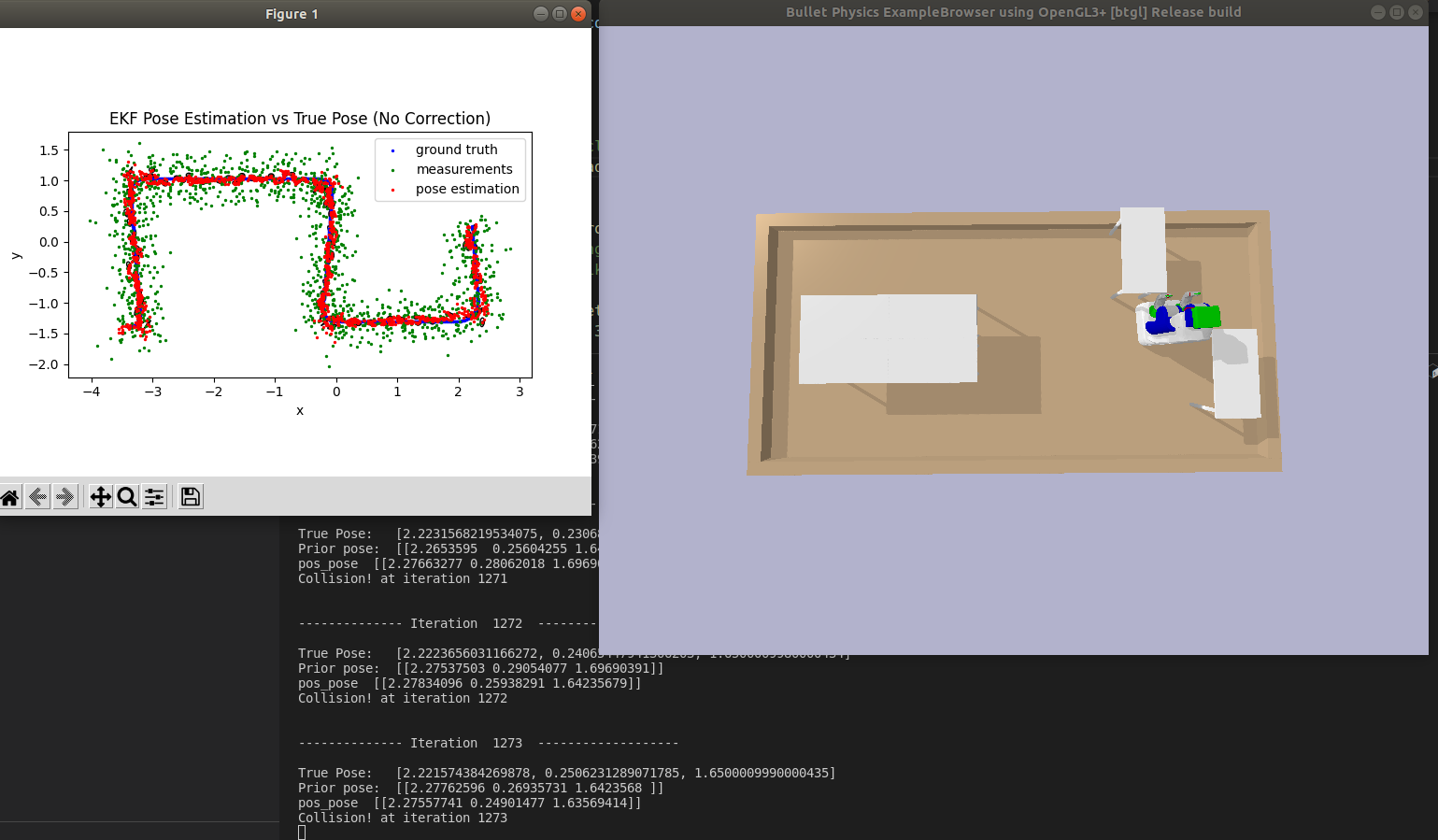
(2) Particle Filter
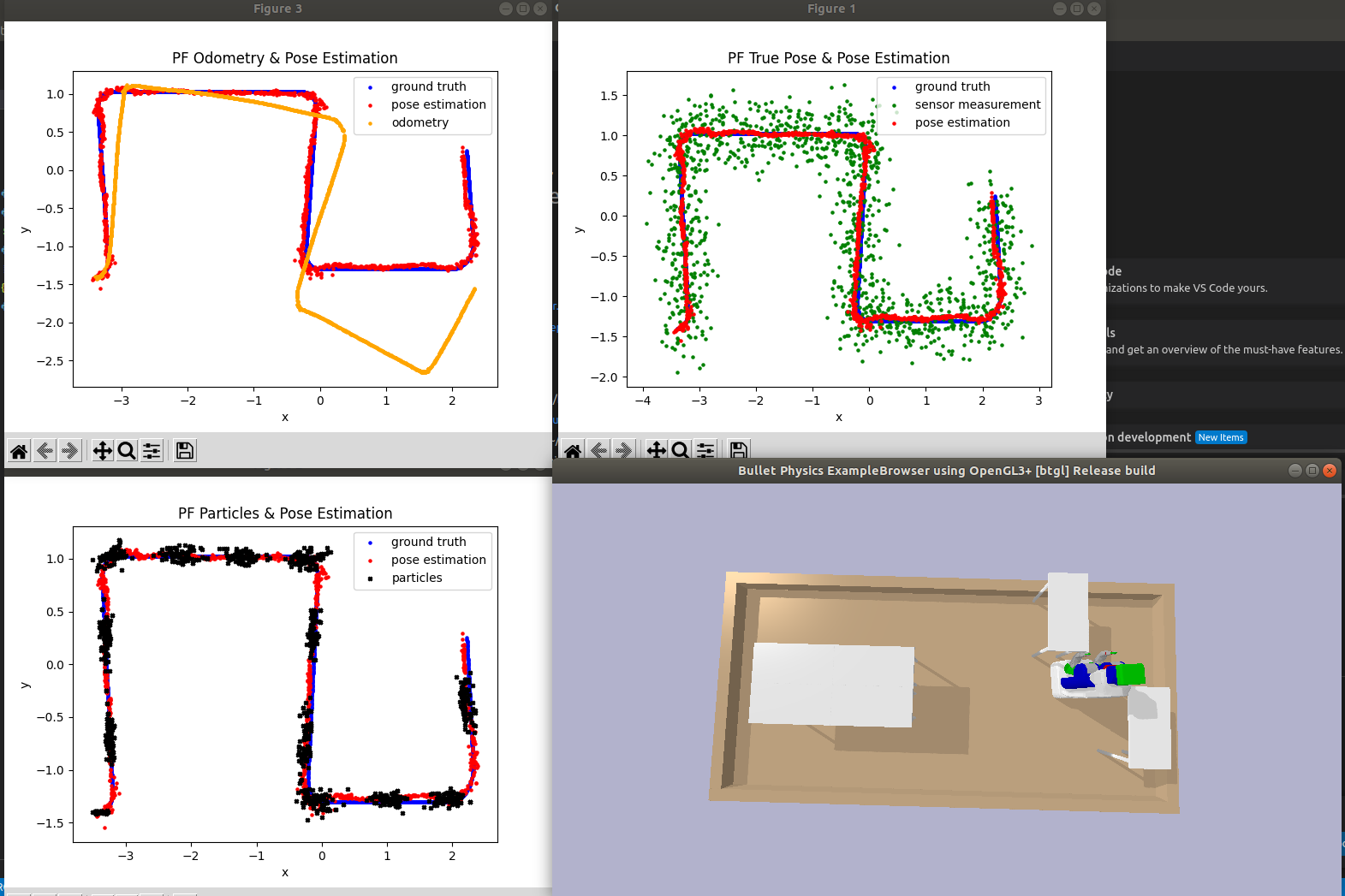
Report
Github repo: Final Project: Localization
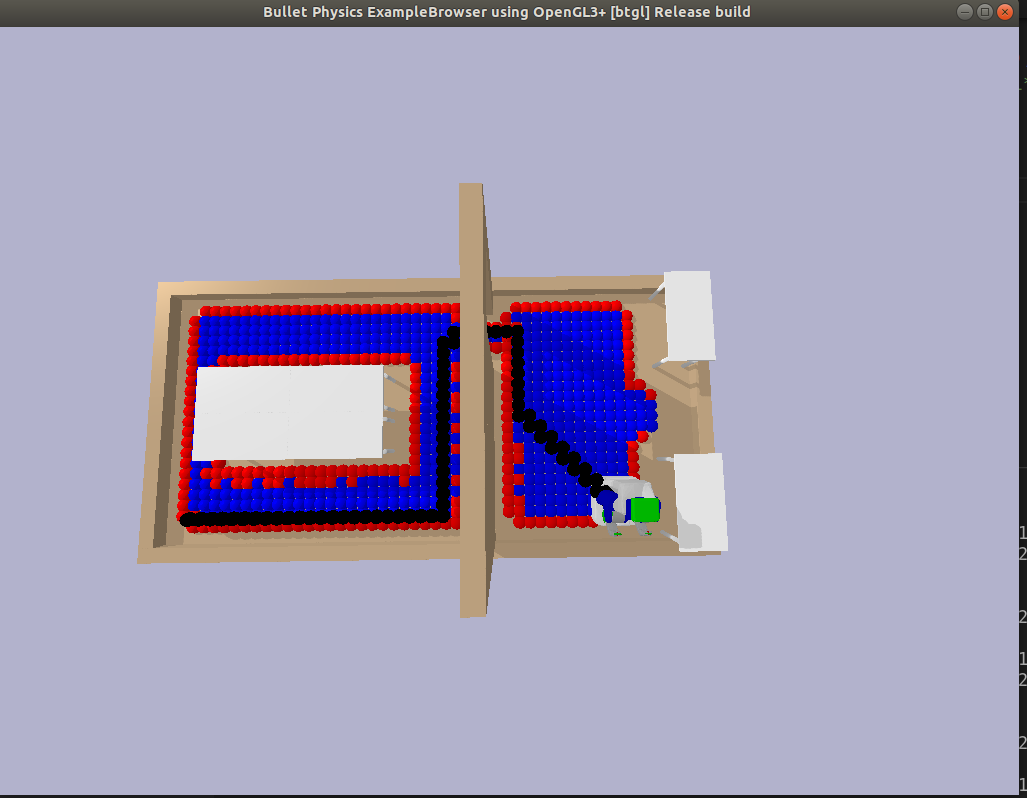
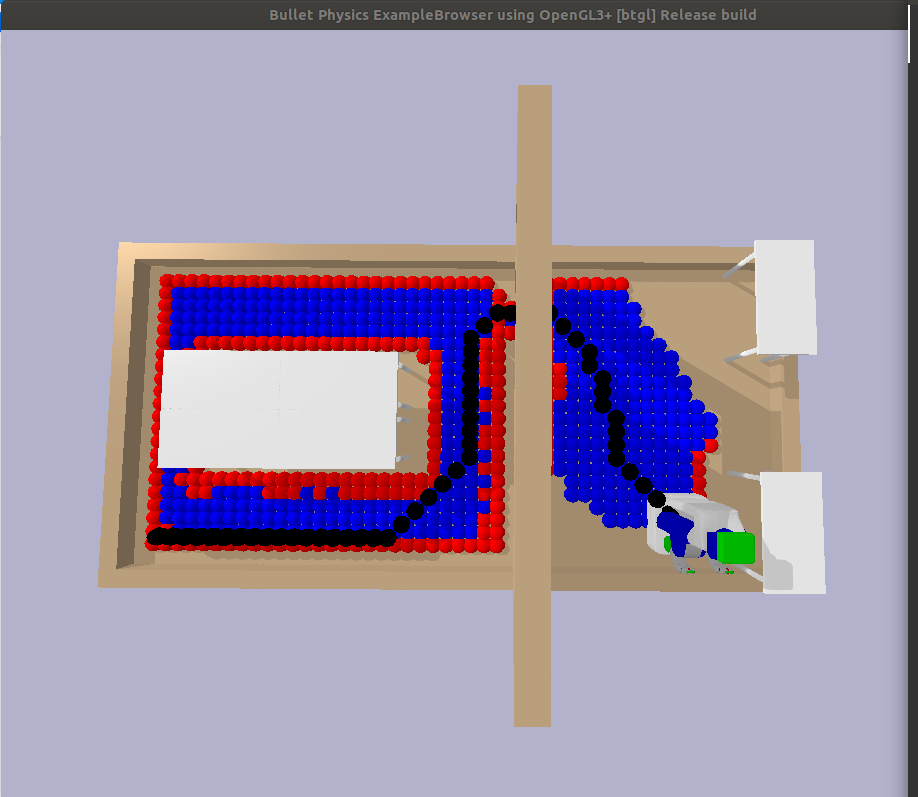
4. Botlab
ROB550: Robotic Systems Lab - Fall 2021
An autonomous exploration & SLAM differential drive robot.
Demo Video
Returning Home:
Report
Github - Botlab
GIthub - mobilebot (for BeagleboneBlue motor control)
5. Armlab
ROB550: Robotic Systems Lab - Fall 2021
An autonomous object detection & object placement manipulator
Demo Video
Report
Github - armlab
Older Projects:
–
- 1. Parallel Programming - NTHU, fall 2020
- 2. Mobile Robots - NCTU, fall 2020
- 3. LoCoBot Projects - NCTU, fall 2020
- 4. Rocket Design and Realization - NCTU, fall 2020
- 5. Machine Learning - NTHU, fall 2020
- 6. Operating System- NTHU, fall 2020
Certificates
1. Robotics - Coursera

2. Deep Learning (Neural Networks) - Coursera
3. Self-Driving Cars - Coursera
State Estimation for Self-Driving Cars
Motion Planning for Self-Driving Cars
Visual Perception for Self-Driving Cars
Activities
About me:
I like to travel, hike and take photos around the world. My photography porfolio: goroyeh.photography